Sammen med blu Empowered by KAEFER og Envirex utvikler vi en klatrende robot og et digitalt økosystem som øker sikkerheten, reduserer materialsvinn og kutter kostnader for prosessanlegg.
Utfordring
I prosessanlegg finnes det store mengder rør. Disse er det viktig at isoleres godt. Isolasjonen brukes som passiv brannbeskyttelse, og utgjør en viktig del av anleggenes sikkerhetssystem.
Rør isoleres også for støyreduksjon og for å redusere effekttap. Isolasjonen består av et lag isolerende materiale rundt røret, og et beskyttende lag i blikk ytterst.
En konsekvens av isolasjonen er at det blir umulig å se om røroverflaten ruster. Dette skaper hodebry, både for eierne av prosessanleggene og operatører på felt.
Siden rust på hydrokarbonførende og andre kritiske rørlinjer kan ha alvorlige følger, skifter eiere ut store mengder isolasjon unødvendig for å være på den sikre siden. Det gir store kostnader og belaster miljøet negativt.

Løsning
blu Empowered by KAEFER utvikler et høyteknologisk digitalt økosystem for å forutsi rust med bedre nøyaktighet. Denne artikkelen handler om roboten, men Bouvet er involvert i utviklingen av alle komponentene.
Økosystemet består av disse hovedkomponentene:
-
Spesialiserte sensorer for måling av fuktighet og temperatur
-
Infrastruktur for innsamling og lagring av målinger til en skybasert IoT-plattform
- Komponenter for prediksjon og visualisering
- Robot for effektiv installering av sensorer
Monkeybot automatiserer sensormontering
På nye installasjoner kan sensorer monteres som en del av isolasjonsarbeidet. Sensorene er rimelige, og tilleggskostnaden for instrumentering er neglisjerbar.
Ved ettermontering av sensorer er situasjonen annerledes. Da kreves det tilkomst og sikring som gjør at kostnad per montert sensor ofte kan bli høy.
Sensorene må installeres med korte mellomrom. Bare på ett prosessanlegg kan det bety flere tusen sensorer. Det krever samtidig store stillaser, mye arbeidstid og områder som midlertidig må stenges. Her kommer Monkeyboten inn. Roboten kan klatre langs rørene og montere sensorene.
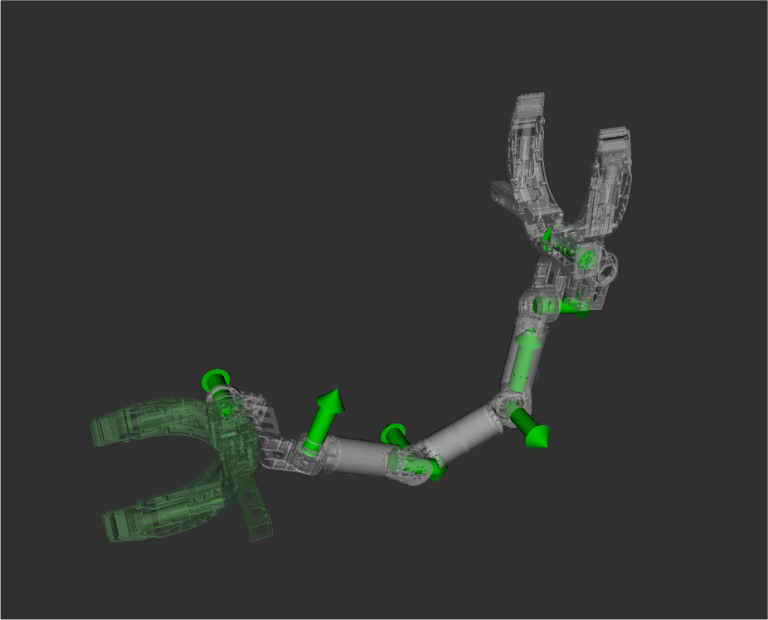
Monkeybot utvikles av blu Empowered by KAEFER i samarbeid med Envirex og Bouvet. Roboten har fått navnet Monkeybot etter dens evne til å klatre på og mellom rør som en apekatt.
Bouvet har vært med å utvikle styresystemet til Monkeybot, i tillegg har vi vært involvert i behovsanalysen og tjenestedesign knyttet til robotens funksjonalitet.
Slik fungerer Monkeybot
- Den har 8 motorer
- Den har to gripere med en åpne/lukke-mekanisme
- Den har forskjellige bevegelsesmønstre – foreløpig larve og apekatt.
- Den har verktøy for å installere sensorer i griperne. Den freser hull i claddingen til isolasjonen, og monterer sensorer.
- Griperne kan byttes ut og tilpasses forskjellige dimensjoner.
Om styresystemet
Det er et team fra industrimiljøet vårt i Haugesund som bistår blu Empowered by KAEFER i utviklingen av styresystemet til Monkeybot. Styresystemet brukes til å styre, justere og overvåke roboten og dens prosesser.
Styresystemet muliggjør at roboten både kan bevege seg autonomt og utføre handlinger basert på sensordata og programmerte regler, men også fjernstyres av operatører.
For at roboten skal kunne bevege seg i ukjente miljøer uten å kollidere med omgivelsene, må den danne seg et bilde av omverdenen. Det gjøres via stereokameraer og IMU i begge ender av roboten.
IMU står for Inertial Measurement Unit og refererer til en enhet som måler akselerasjon, hastighet, tid og rotasjon og analyserer bevegelsesmønstrene.
Et stereokamera er et avansert kamerasystem som simulerer menneskets synsfelt. Det kan beregne avstander til objekter og lage en 3D-modell av området.
Sensordataene sendes til styresystemet, som fortløpende oppdaterer en 3D-modell av robotens omgivelser. Til dette benyttes det SLAM-teknologi, som står for Simultaneous Localization and Mapping. Her anvendes det avanserte metoder, som blant annet Kalman-filtrering, for å fusjonere sammen sensorstrømmene til et pålitelig signal.
Resultatet av dette er punktskyer som brukes til å lage OctoMaps. Dette er en 3D-modell og data-struktur lagret som en "octree" (oktre). Fordelen med dette er at man raskt kan hente ut modeller av omgivelsene i forskjellig oppløsninger, avhengig av hvilken nøyaktighet som er nødvendig. Dette effektiviserer kollisjons-sjekking.
Veien videre
Monkeybot gjøres nå klar til å bli tatt i bruk på prosessanlegg. Videre arbeid for Bouvet vil innebære ytterligere automatisering av robotens arbeidsoperasjoner:
• Automatisert gripefunksjon rundt rørkonstruksjoner
• Fullautonom utforskning av omgivelser
• Fullautonom navigering langs rørstrekk
Ta kontakt om du vil vite mer om prosjektet eller hva vi kan gjøre for deg
Kunde: blu Empowered by KAEFER
Kontor: Haugesund
Bransje: Energi, Inustri







